以流程图和日志方式,实时检测网络中所有机器人 的运行状态,正常或异常情况及时反馈
实时对网络内的每一个机器人进行启动或停止操作
可为网络内的每一个机器人设置其运行的计划任务
记录机器人集群的历史运行轨迹,形成日志记录
对于机器人实际运行时遇到的场景异常情况,可 自动通过邮件反馈给管理员
协调、组织网络内机器人集群的群发协同工作
工作流还可以封装成过程、片段、动作集等层级模块,并可互相调用、重复调用,方便快捷。
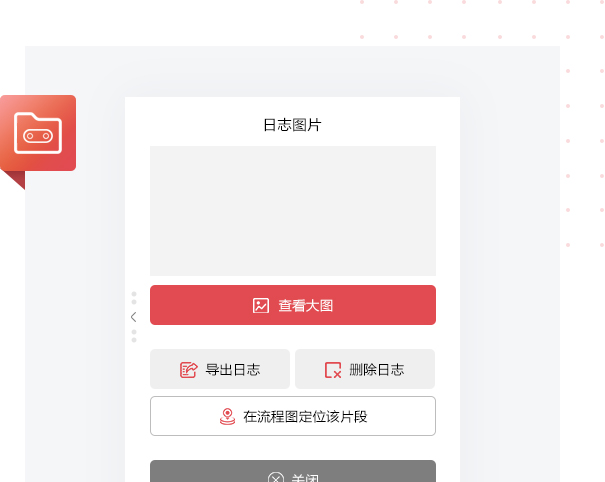
非常详细的机器人运行日志管理,把机器人运行的每一步细节记录下来,并 可截图,方便管理者追踪机器人运行状态。
机器人可设置与人类进行文字或声音交互。
可在运行时自定义屏幕的分辨率和背景壁纸,方便机器 人在特定的环境下运行。